
News
- [Jul 2026]: My first students' papers were accepted to MILE workshop at RO-MAN 2026!
- [Jul 2026]: My PhD defense committee is officially announced!
- [Apr 2026]: I presented my HRI paper at COMETE Workshop at UniTo!
- [Feb 2026]: I joined AIRlab as a visiting PhD student to work on assistive and helpful HRI in Torino!
- [Feb 2026]: MoIRA has been accepted to Neurocomputing!
- [Dec 2025]: EED Gym was accepted to HRI 2026!
- [Sep 2025]: Gave a talk and joined a panel at AI & BigData Day 2025.
- [Jul 2025]: Released two of our preprints: MoIRA and TD-MPC-Opt!
- [Jun 2025]: Gave a talk about my AAMAS work at RL Reading Club, University of Southampton!
- [May 2025]: Presented a poster on knowledge-based MBRL distillation at AAMAS 2025!
- [Oct 2023]: Started PhD in Computer Science at NaUKMA, advised by Dr. Nadiya Shvai.
Selected Publications
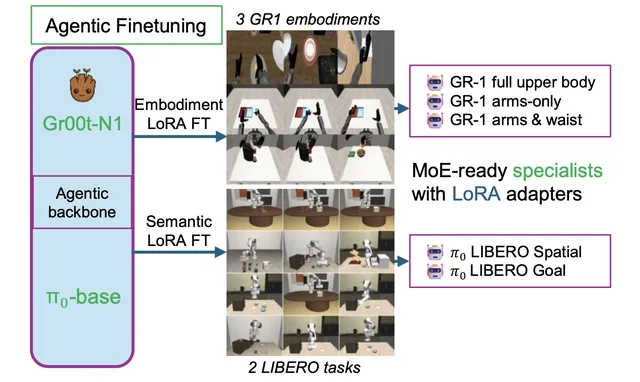
MoIRA: Modular Instruction Routing Architecture for Multi-Task Robotics
Neurocomputing, 2026
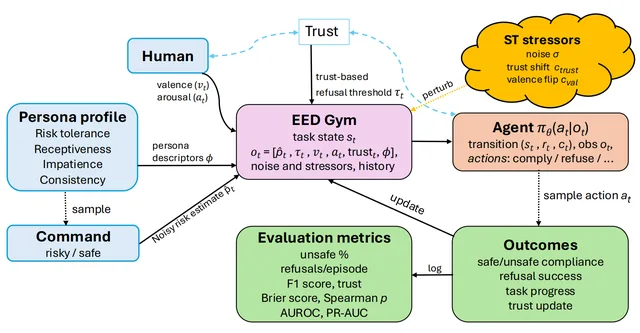
When Robots Say No: The Empathic Ethical Disobedience Benchmark
ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2026
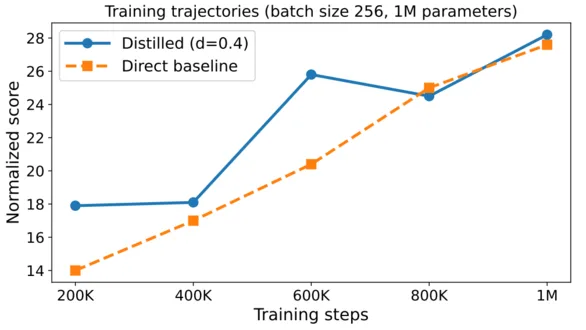
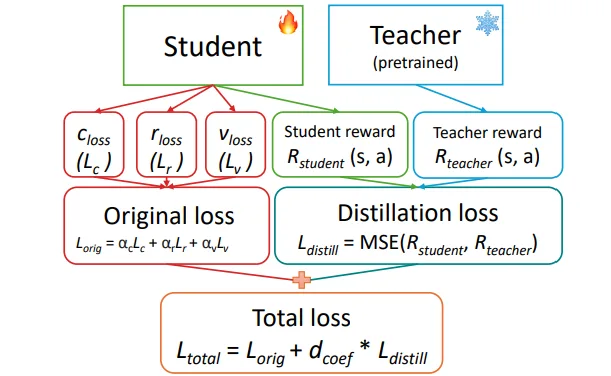
TD-MPC-Opt — Distillation & Quantization for Efficient Multi-Task Model-Based RL
Preprint (under review), 2025
Knowledge Transfer in Model-Based Reinforcement Learning Agents for Efficient Multi-Task Learning
International Conference on Autonomous Agents and Multiagent Systems (AAMAS), 2025
Academic Service
- Reviewer, Behaviour and Information Technology
- PC Member, ICTERI 2026
- Reviewer, ICSR 2026
- Reviewer, HRI 2026
- Reviewer, Journal of Field Robotics
Teaching
Senior Lecturer, NaUKMA
13 undergraduate theses supervised
Courses:
- MSc Reinforcement Learning (Spring '23-'25)
- MSc Machine Learning (Fall '22-'23; Spring '25-'26)
- MSc Image Analysis & Computer Vision (Spring '24-'26)
- MSc NLP Systems (Fall '24-'25)
- MSc Computer Vision (Fall '22-'25)
- BSc Machine Learning (Fall '24-'25)
- BSc Deep Learning for Computer Vision (Spring '24-'26)